Informācijas 4D transportiera sistēma





ķēdes konveijers
| projekts | Pamatdati | Piezīme |
| modelis | SX-LTJ-1.0T -600H | |
| Motora reduktors | ŠŪT | |
| struktūras tips | Rāmis ir izgatavots no alumīnija sakausējuma, bet kājas un līkumi ir izgatavoti no oglekļa tērauda | |
| kontroles metode | Manuāla/autonomā/tiešsaistes/automātiskā vadība | |
| drošības pasākumi | Elektriskā bloķēšana, aizsargvadotnes abās pusēs | |
| pieņemt standartu | JB/T7013-93 | |
| lietderīgā slodze | Maks. 1000 kg | |
| kravas pārbaude | Fotoelektriskie sensori | SICK/P+F |
| ķēdes sliede | Neilona sliede ar zemu berzi | |
| konveijera ķēde | Donghua ķēde | |
| gultnis | Fukuyama aparatūra, noslēgti lodīšu gultņi | |
| pārsūtīšanas ātrums | 12 m/min | |
| Virsmas apstrāde un pārklāšana | Kodināšana, fosfatēšana, izsmidzināšana | |
| trokšņu kontrole | ≤73db | |
| virsmas pārklājums | datora pelēkā krāsā | Pievienotie paraugi |
Iekārtu struktūra
Konveijers sastāv no rāmja, balstiem, piedziņas bloka un tā tālāk. Rāmis ir izgatavots no alumīnija sakausējuma, un abi gali ir fiksēti bezzobaini atpakaļgaitas riteņi. Konveijera ķēde ir taisna divrindu ķēde ar soli P = 15,875 mm. Ķēdes balsts ir izgatavots no augsti molekulāra polietilēna (UHMW) ar pašeļļojošu efektu. Metinātie balsti ir savienoti ar galveno rāmi ar skrūvju spiediena plāksni, M20 skrūvju regulēšanas pēdas ir savienotas ar zemi, un transportēšanas virsmas augstumu var regulēt par +25 mm. Piedziņas ierīce sastāv no iebūvēta palēninājuma motora vidū, piedziņas vārpstas mezgla, transmisijas zobratu komplekta, motora sēdekļa un ķēdes spriegošanas ierīces, un skrūves tipa regulēšanas spriegotāja skriemelis nospriego transportēšanas ķēdi.
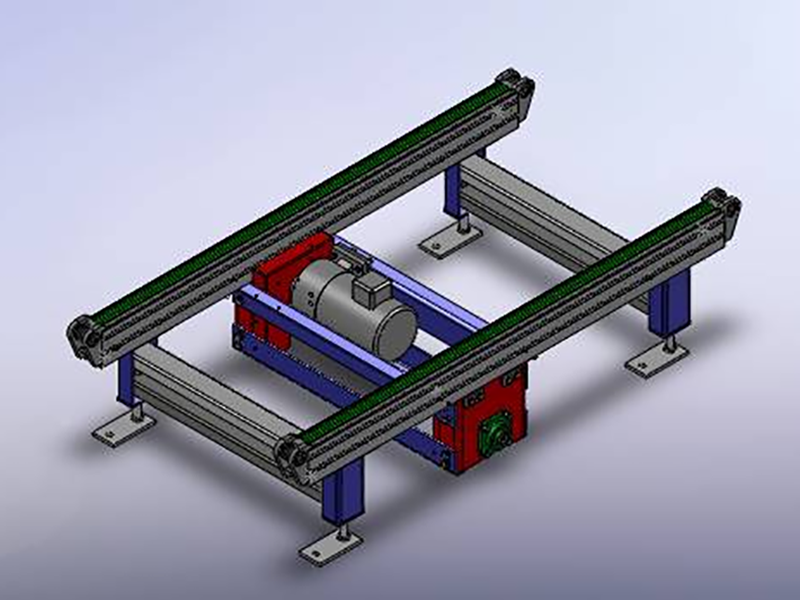
darbības princips:
Motors darbina piedziņas vārpstu caur transmisijas grupu, un piedziņas vārpsta darbina transportēšanas ķēdi, lai realizētu paletes transportēšanas funkciju.
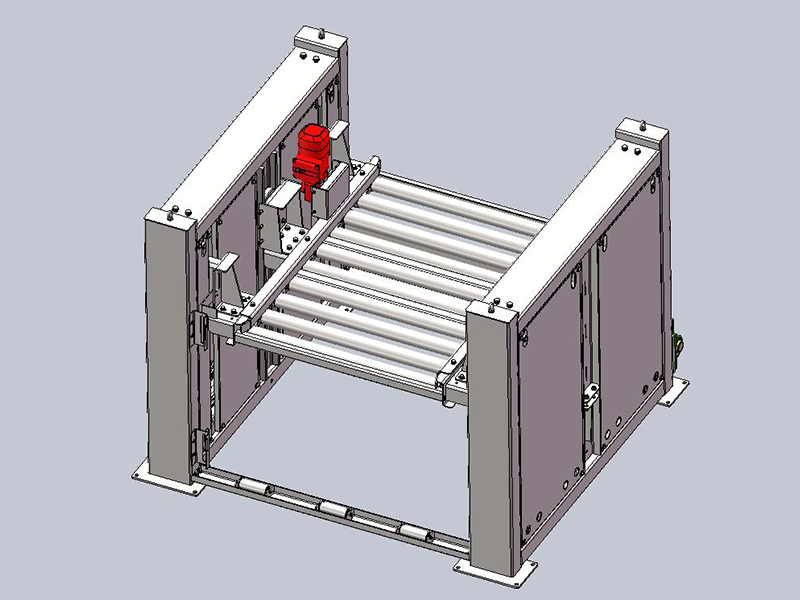
Rullīšu konveijers
| Prece | Pamatdati | Piezīmes |
| Modelis | SX-GTJ-1.0T -600H | tērauda konstrukcija |
| Motora reduktors | ŠŪT | |
| struktūras tips | oglekļa tērauda locīšana | |
| kontroles metode | Manuāla/autonomā/tiešsaistes/automātiskā vadība | |
| lietderīgā slodze | Maks. 1000 kg | |
| pārsūtīšanas ātrums | 12 m/min | |
| veltnis | 76 dubultās ķēdes veltnis | |
| piedziņas ķēde | Huadong ķēžu rūpnīca | |
| gultnis | Ha ass | |
| Virsmas apstrāde un pārklāšana | Kodināšana, fosfatēšana, izsmidzināšana | |
Iekārtu struktūra
Iekārtas struktūra: Rullīšu galda mašīna sastāv no rāmja, balstiem, veltņiem, piedziņas un citām vienībām. Rullītis φ76x3 vienpusējs dubults ķēdes rats ar cinkotu veltni, veltņu atstatums P = 174,5 mm, vienpusējs dubults ķēdes rats. Metinātie balsti ir savienoti ar galveno rāmi ar skrūvju spiediena plāksni, M20 skrūvju regulēšanas kājas ir savienotas ar zemi, un transportēšanas virsmas augstumu var regulēt par +25 mm. Piedziņas ierīce sastāv no iebūvēta palēninājuma motora vidū, transmisijas ķēdes ratu komplekta, motora sēdekļa un ķēdes spriegošanas ierīces.
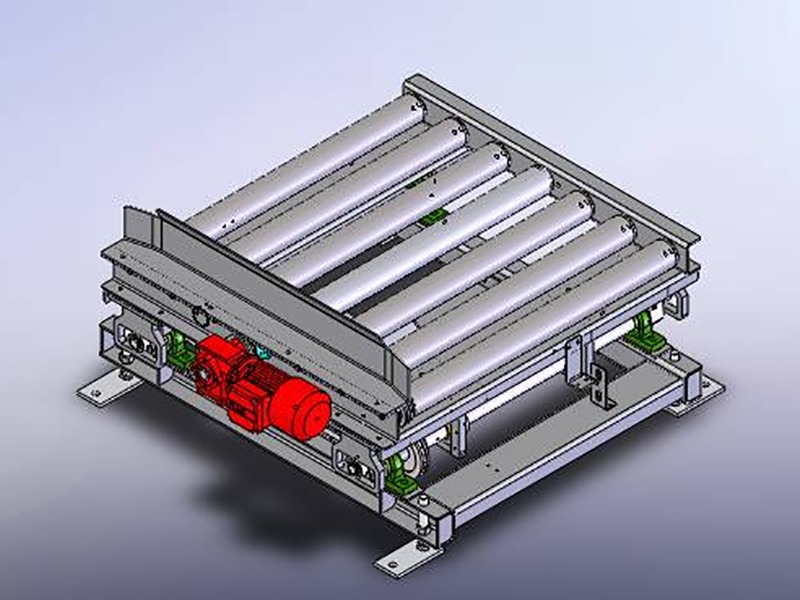
Darbības princips: Motors darbina veltni caur ķēdi, un veltnis tiek pārsūtīts uz blakus esošo veltni caur citu ķēdi un pēc tam uz citu veltni, lai realizētu konveijera transportēšanas funkciju.
Domkrata un pārvietošanas mašīna
| projekts | Pamatdati | Piezīme |
| modelis | SX-YZJ-1.0T-6 0 0H | tērauda konstrukcija |
| Motora reduktors | ŠŪT | |
| struktūras tips | oglekļa tērauda locīšana | |
| kontroles metode | Manuāla/autonomā/tiešsaistes/automātiskā vadība | |
| drošības pasākumi | Elektriskā bloķēšana, aizsargvadotnes abās pusēs | |
| Standarta | JB/T7013-93 | |
| lietderīgā slodze | Maks. 1000 kg | |
| kravas pārbaude | Fotoelektriskie sensori | SICK/P+F |
| veltnis | 76 dubultās ķēdes veltnis | |
| Gultņi un korpusi | Gultnis: Harbin vārpsta; Gultņa ligzda: Fushan FSB | |
| pārsūtīšanas ātrums | 12 m/min | |
| Virsmas apstrāde un pārklāšana | Kodināšana, fosfatēšana, izsmidzināšana | |
| trokšņu kontrole | ≤73dB | |
| virsmas pārklājums | datora pelēkā krāsā | Pievienotie paraugi |
Iekārtu struktūra
Iekārtas struktūra: Veltņu pārvietošanas mašīna sastāv no transportēšanas daļām, pacelšanas mehānismiem, vadotnēm un citām vienībām. Transportēšanas virsmas augstuma regulēšana +25 mm. Pacelšanas mehānisms izmanto motora piedziņas kloķvārpstas principu, un piedziņas ierīce sastāv no iebūvēta reduktora vidū, transmisijas zobratu komplekta, motora sēdekļa un ķēdes spriegošanas ierīces.
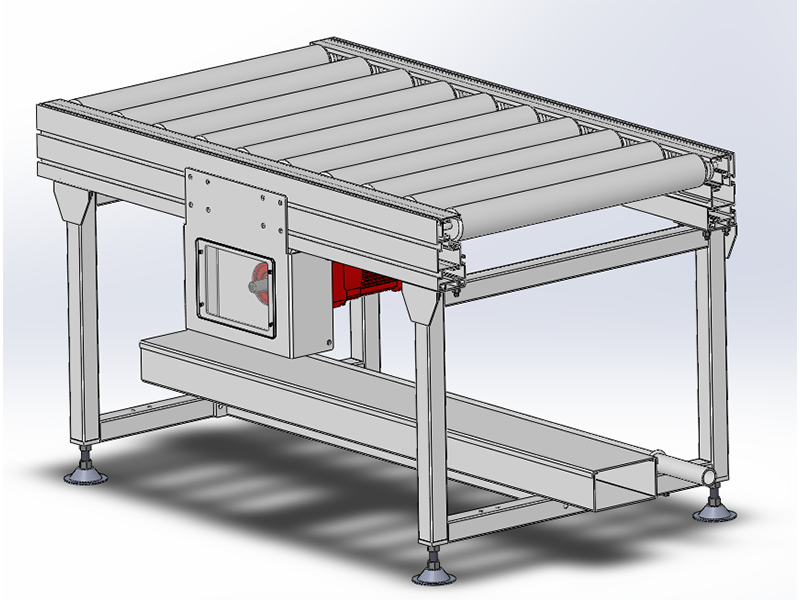
Darbības princips: Kad palete ar atbilstošu konveijeru tiek nogādāta uz iekārtu, iedarbojas domkrata motors, darbinot sadales mehānismu, lai paceltu paleti, un domkrata motors apstājas, kad tā ir savā vietā; transportēšanas motors ieslēdzas, nogādājot paleti uz piestiprināšanas iekārtu, un motors apstājas, domkrata motors darbojas, un sadales mehānisms tiek darbināts, lai nolaistu iekārtu, un, kad tā ir savā vietā, domkrata motors apstājas, lai pabeigtu darba ciklu.
Pārejas konveijers
| 1) projekts | Pamatdati | Piezīme |
| modelis | SX-GDLTJ-1.0T-500H-1.6L | |
| Motora reduktors | ŠŪT | |
| struktūras tips | Kājas un saliekts oglekļa tērauds | |
| kontroles metode | Manuāla/autonomā/tiešsaistes/automātiskā vadība | |
| drošības pasākumi | Elektriskā bloķēšana, aizsargvadotnes abās pusēs | |
| Standarta | JB/T7013-93 | |
| lietderīgā slodze | Maks. 1000 kg | |
| kravas pārbaude | Fotoelektriskie sensori | SICK/P+F |
| ķēdes sliede | Neilona sliede ar zemu berzi | |
| konveijera ķēde | Donghua ķēde | |
| Gultņi un korpusi | Gultnis: Harbin vārpsta, gultņa sēdeklis: Fukuyama FSB | |
| pārsūtīšanas ātrums | 12 m/min | |
| Virsmas apstrāde un pārklāšana | Kodināšana, fosfatēšana, izsmidzināšana | |
| trokšņu kontrole | ≤73dB | |
| virsmas pārklājums | datora pelēkā krāsā | Pievienotie paraugi |
Iekārtu struktūra
Iekārtas struktūra: Šī iekārta tiek izmantota pacēlāja un plaukta savienojumā, un konveijers sastāv no rāmja, balstiem un piedziņas bloka. Konveijera ķēde ir taisna divrindu ķēde ar soli P = 15,875 mm. Ķēdes balsts ir izgatavots no augsti molekulāra polietilēna (UHMW) ar pašeļļojošu efektu. Metinātas kājas, kas savienotas ar plaukta korpusu. Piedziņas ierīce sastāv no iebūvēta palēninājuma motora vidū, piedziņas vārpstas mezgla, transmisijas zobratu komplekta, motora sēdekļa un ķēdes spriegošanas ierīces, un skrūves tipa regulēšanas spriegotāja skriemelis nospriego transportēšanas ķēdi.
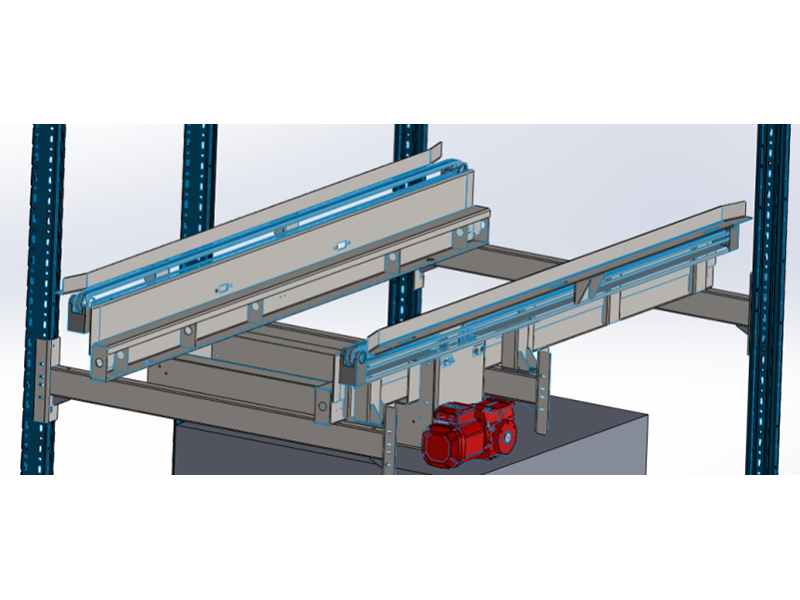
Darbības princips: Motors darbina piedziņas vārpstu caur transmisijas grupu, un piedziņas vārpsta darbina transportēšanas ķēdi, lai realizētu paletes transportēšanas funkciju.
grīdas lifts
| projekts | Pamatdati | Piezīme |
| modelis | LDTSJ-1.0T-700H | tērauda konstrukcija |
| Motora reduktors | ŠŪT | |
| struktūras tips | Kolonna: liekts oglekļa tērauds Ārējā puse: blīvēts tērauds | |
| kontroles metode | Manuāla/autonomā/tiešsaistes/automātiskā vadība | |
| drošības pasākumi | Elektriskā bloķēšana, kritiena apturēšanas ierīce | |
| Standarta | JB/T7013-93 | |
| lietderīgā slodze | Maks. 1000 kg | |
| kravas pārbaude | Fotoelektriskie sensori | SICK/P+F |
| veltnis | 76 dubultās ķēdes veltnis | |
| celšanas ķēde | Donghua ķēde | |
| gultnis | Vispārīgie gultņi: Harbin vārpstas atslēgas gultņi: NSK | |
| skriešanas ātrums | Pārvades ātrums: 16 m/min, pacelšanas ātrums: 6 m/min | |
| Virsmas apstrāde un pārklāšana | Kodināšana, fosfatēšana, izsmidzināšana | |
| trokšņu kontrole | ≤73dB | |
| virsmas pārklājums | datora pelēkā krāsā | Pievienotie paraugi |
galvenā struktūra un funkcijas
Rāmis: kā kolonna tiek izmantota 5 mm oglekļa tērauda saliekta plāksne, un ārpuse ir noslēgta ar tērauda plāksni;
Pacelšanas daļa:
Pacēlāja augšpusē ir uzstādīts pacelšanas rāmis, rāmis ir izgatavots no oglekļa tērauda, un pacelšanas motors darbina pacelšanas ķēdes rata mezglu, lai tas darbotos caur ķēdi.
Iekraušanas platforma:
Izgatavots no oglekļa tērauda. Iekraušanas platforma ir aprīkota ar standarta konveijeru.
darbības princips:
Pacelšanas motors darbina iekraušanas platformu, lai pabeigtu pacelšanas darbus; konveijers uz iekraušanas platformas var nodrošināt preču vienmērīgu ievešanu un izvešanu no lifta.



